今日の例題 「 カルマンフィルタ 」
- 解説: カルマンフィルタによる予測
線形離散時間定常確率システムは,次のように表現される。
第1式がシステムを記述する状態方程式,第2式が,観測系を記述する観測方程式である。ここで,システム雑音 w と観測雑音 v の共分散は,
このような状態空間表現において,カルマンフィルタによる1期先予測は,次のような逐次推定アルゴリズムとして与えられる。
t-1時点までの観測 Y(t-1)=[y(t-1),y(t-2),...] に基づいて,状態 x の最適な予測値 〔x(t-1)|Y(t-1)〕 を手にしていたとすると,1期先の状態 x(t) は,状態方程式から
と予測できる。ここで P は,x の予測値の共分散である。
t の時点には,新たな観測値 y(t) が得られるから,観測方程式によって,この事前予測値 〔x(t)|Y(t-1)〕 を改善・更新 〔x(t)|Y(t)〕 することができる。
ここで,K は,カルマンゲインと呼ばれる。
一方,観測値 y の1期先予測値 y(t+1|t) は,
で与えられる。ここで,S は,y の予測値の共分散である。
これらのステップを繰返すことによって,状態の推定を逐次改善していきながら,観測値の推定が行えるのである。
時系列の自己回帰モデル(ARモデル)
は,状態空間で,たとえば以下のように表現できる。
この表現は,講義で解説した正統的な形式とは異なっている(システム雑音の表現が w(t-1)->w(t) になっている)が,この表現によっても,カルマンフィルタによる予測に不都合は生じない。 - 例題プログラム: [ kalman.m ]
次のプログラムは,あるARモデルから生成された時系列を例として,カルマンフィルタのアルゴリズムによる逐次予測を実行する(なお,途中からは,観測値が得られないものとして,更新のステップを除いて予測のみを繰り返す,いわゆる長期予測する)プログラムである。
オリジナルのプログラムは, こちらから,ダウンロード% kalman.m
%
% ----------------------------------
% Prediction by Kalman Filter
% ----------------------------------
%
Fs = 1000; N =150; time=1:N;
%
% ----------------------------------
NA = 2; a = [1.4 -0.98]; aa = [1 -a]; % given AR Model
% ----------------------------------
%
yobs = filter(1,aa,1*randn(N,1)); % サンプル時系列生成
subplot(311);plot(yobs);
axis([0 N -20 20]);legend('sample')
%
% State Space Representation
%
% x(t+1) = F x(t) + G w(t) % cov{w(t) w(t)} = {Q 0}
% y(t) = H x(t) + v(t) % {v(t),v(t)} = {0 R}
%
F = [[zeros(1,NA-1); eye(NA-1)] flipud(a')] ;
G = flipud(a') ;
H = [zeros(1,NA-1) 1] ;
Q = 1;
R = 0;
%
% ----------------------------------
% Kalman Filter
% ----------------------------------
%
% initial value
x = zeros(NA,1); % x(0|0)
P = eye(NA); % P(0|0)
ypre = [];
Spre = [];
%
for t=1:N*2/3 % --------- < 一期先予測 + 観測による更新 >
%
% prediction
x = F * x ; % x(t+1|t) <- x(t|t)
P = F * P * F' + G * Q * G' ; % P(t+1|t) <- P(t|t)
ypre = [ypre H*x] ;
Spre = [Spre sqrt(H*P*H'+R)] ;
%
% filtering
K = P * H' / ( H * P * H' + R ) ; % Kalman Gain
x = x + K * ( yobs(t) - H * x ) ; % x(t|t) <- x(t|t-1)
P = P - K * H * P ; % P(t|t) <- P(t|t-1)
end
for t=N*2/3+1:N % --------- < 長期予測(観測更新なし) >
%
% prediction
x = F * x ;
P = F * P * F' + G * Q * G' ;
ypre = [ypre H*x] ;
Spre = [Spre sqrt(H*P*H'+R)] ;
%
end
%
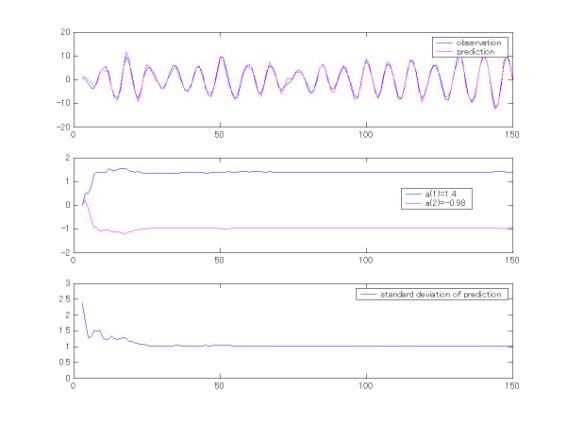
subplot(312);plot(time,yobs,'b',time,ypre,'m');
axis([0 N -20 20]);legend('observation','prediction')
subplot(313);plot(Spre);
axis([0 N 0 10]);legend('standard deviation of prediction ')
%--------------------------------------------------------
- 演習: 例題プログラムを実行してみよう
まず実行してみて,このプログラムの内容をよく理解してください。
- 予測誤差の分散の変化が,何故上のプログラムの結果のようになるか理解してください。
- 与えるARモデルをいろいろ変えてみてください。